机器人学基础(2)-微分运动和速度-雅可比矩阵计算、雅可比矩阵求逆、计算关节运动速度
本文知识点:
坐标系的微分运动、坐标系之间的微分变化、机器人和机器人手坐标系的微分运动、雅可比矩阵的计算、雅可比矩阵求逆、雅可比矩阵和微分算子之间的关联
文章目录
机器人学基础(2)-微分运动和速度-雅可比矩阵计算、雅可比矩阵求逆、计算关节运动速度一、雅可比矩阵二、坐标系的微分运动1、微分平移2、微分旋转1、绕参考轴的微分旋转2、绕一般轴q的微分旋转 3、微分变换(平移+旋转)1、坐标系的微分变换2、坐标系之间的微分变换 三、雅可比矩阵的计算四、雅可比矩阵与微分算子之间的关联例题 五、雅可比矩阵求逆例题1:利用已知雅可比逆求关节速度例题2:利用逆运动方程直接求关节速度 总结
一、雅可比矩阵
雅可比矩阵表示机构部件随时间变化的几何关系,它可以将单个关节的微分运动或速度转换为感兴趣点(如末端执行器)的微分运动或速度,也可以将单个关节的运动与整个机构的运动联系起来。由于关节角的直是随时间变化的,从而雅可比矩阵各元素的大小也随时间变化,因此雅可比矩阵是与时间相关的。
简单来说,雅可比矩阵是能够将机器人中的两点微分运动或速度联系起来,所以雅可比矩阵存储的信息可以理解为该两点之间机器人结构的特性,但又因为该矩阵联系的两点是微分的,所以也叫雅可比矩阵。
二、坐标系的微分运动
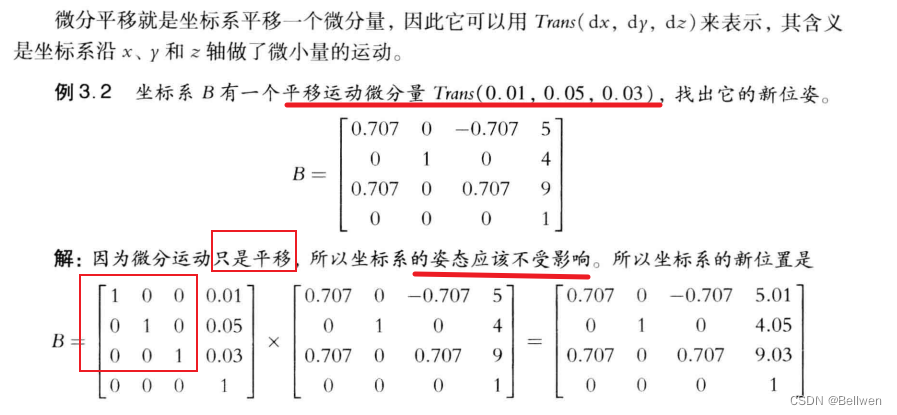
1、微分平移
2、微分旋转
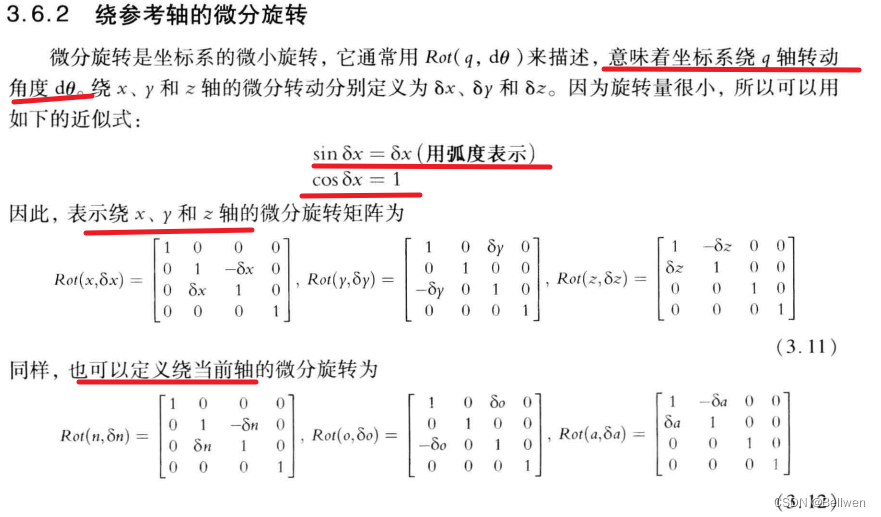
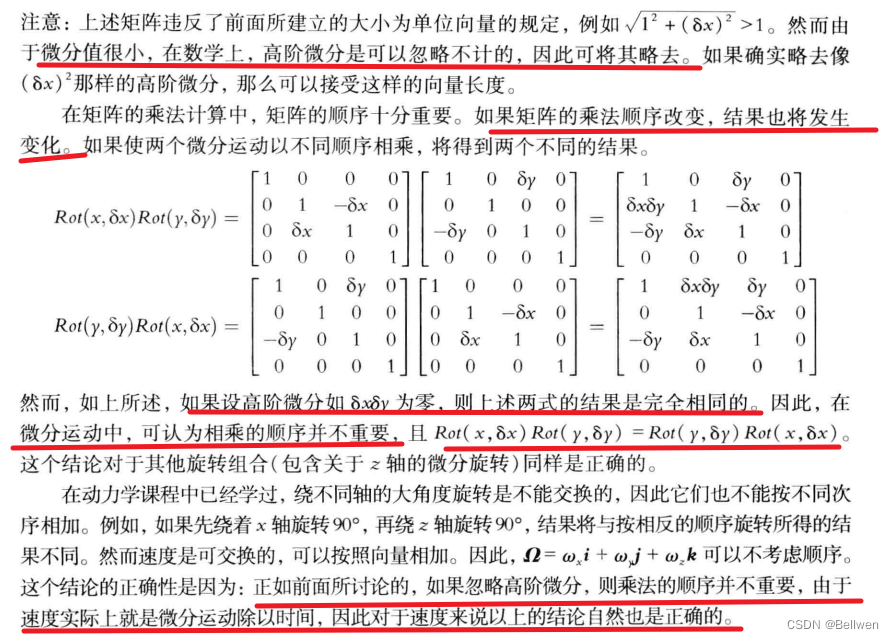
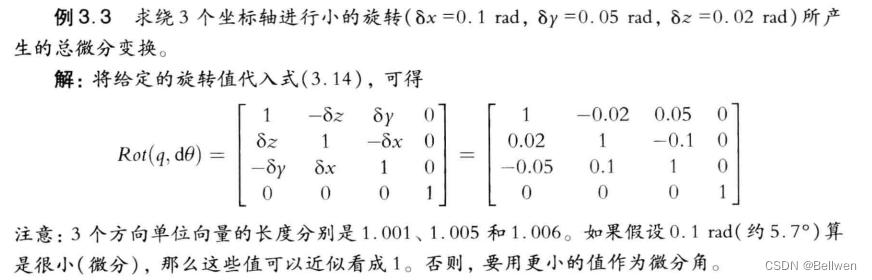
1、绕参考轴的微分旋转
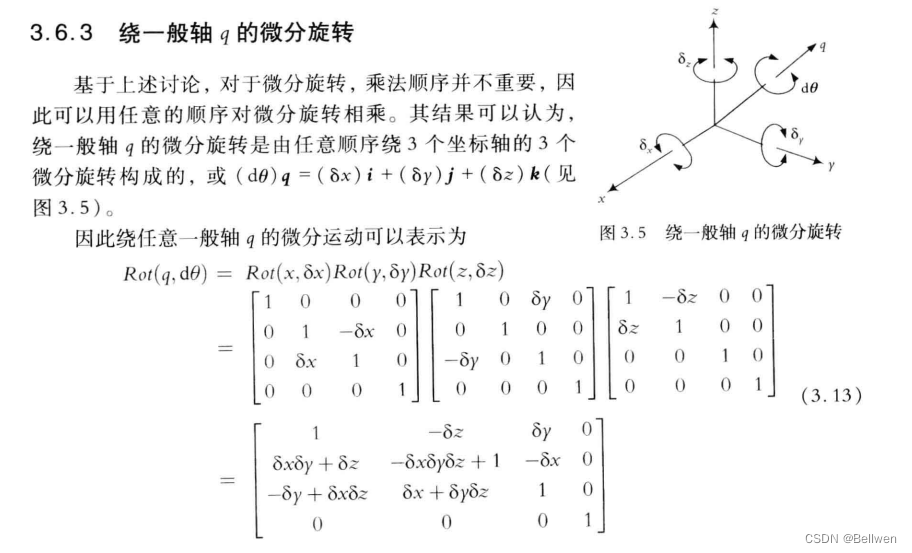
2、绕一般轴q的微分旋转

3、微分变换(平移+旋转)
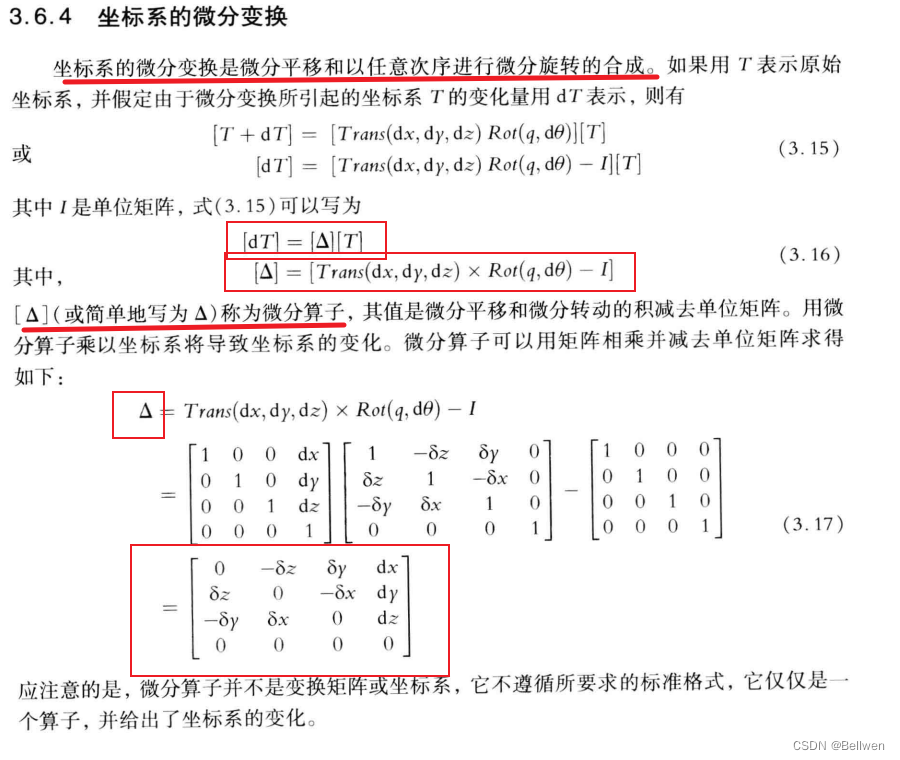
1、坐标系的微分变换

2、坐标系之间的微分变换
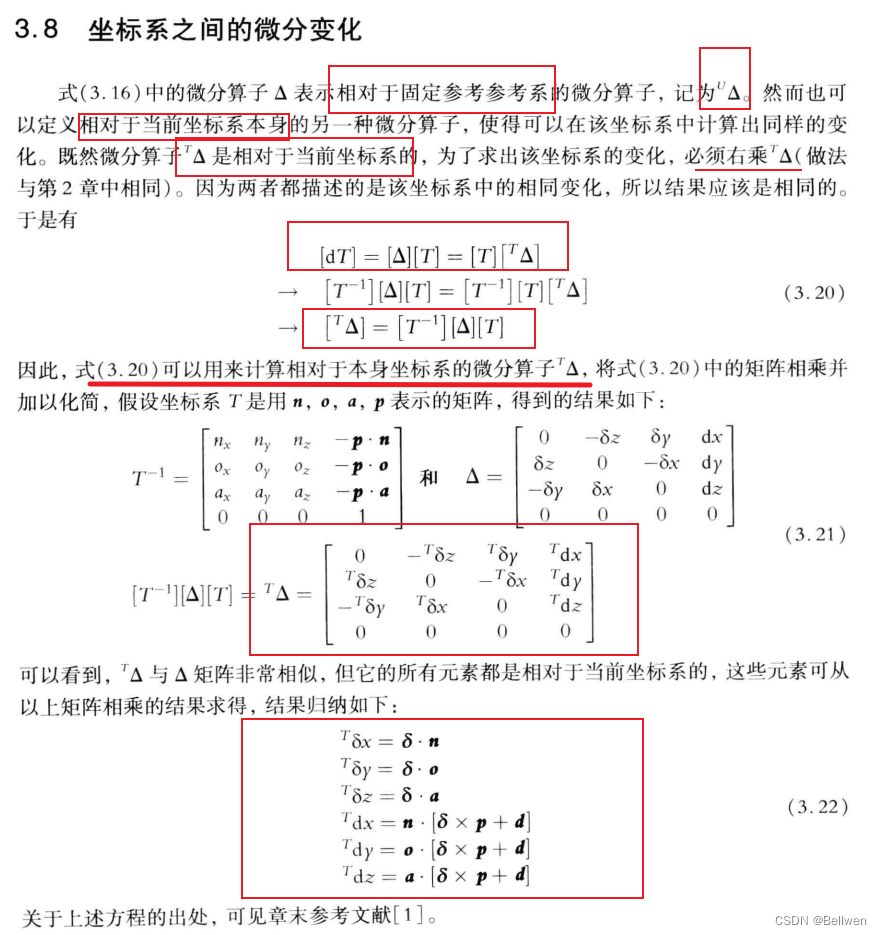
直接用公式来计算相对于本身坐标系的微分算子
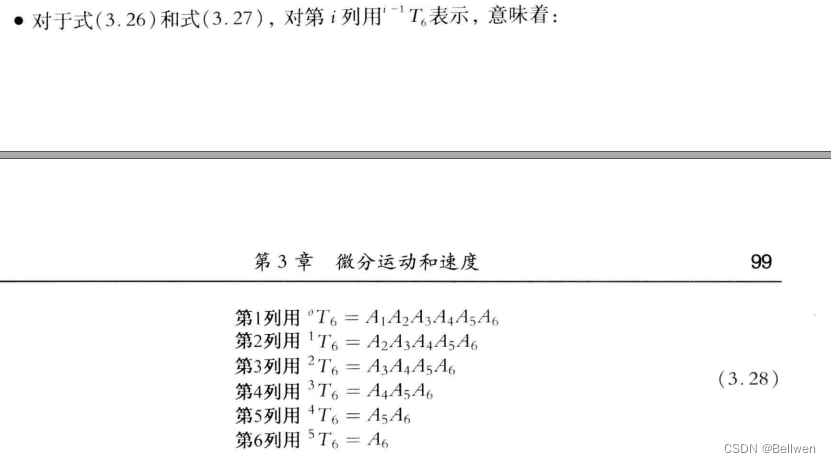
三、雅可比矩阵的计算
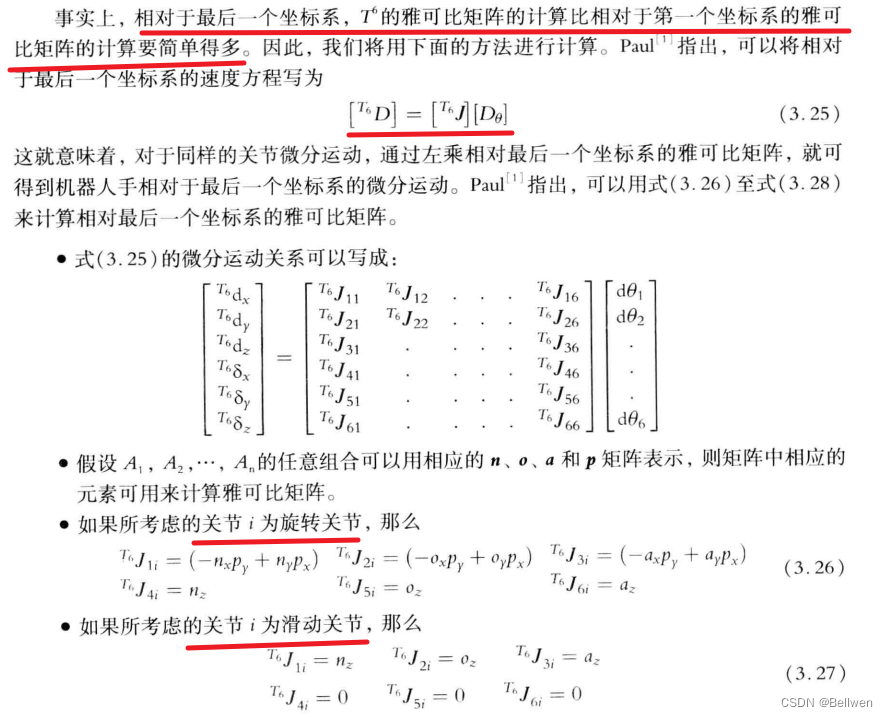
记住此处的雅可比矩阵公式!!!!
直接例题套公式

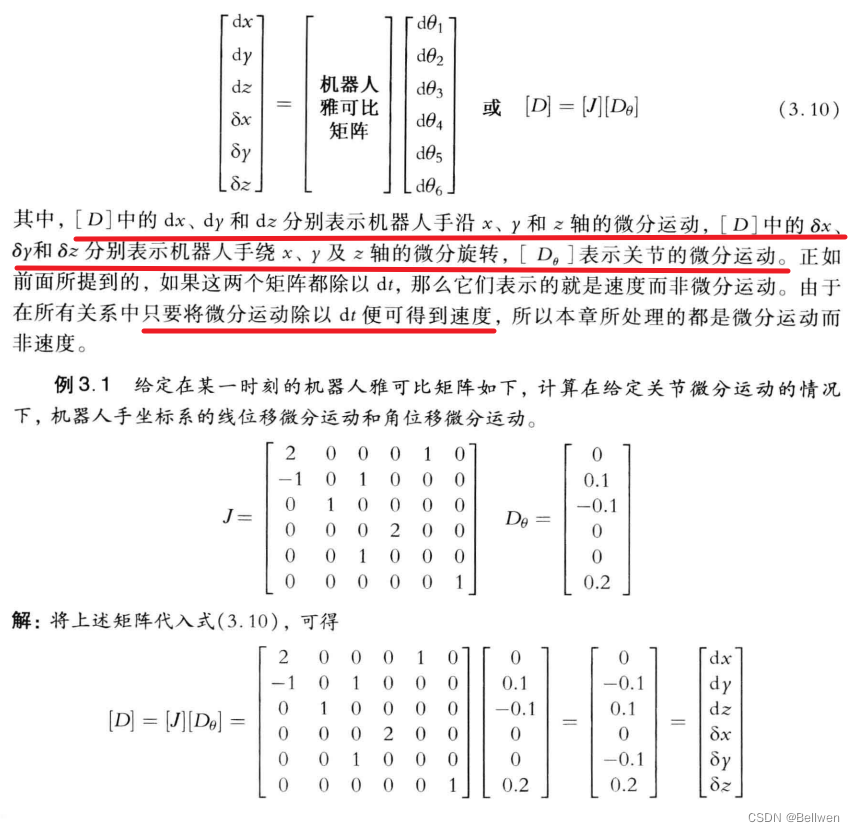
四、雅可比矩阵与微分算子之间的关联
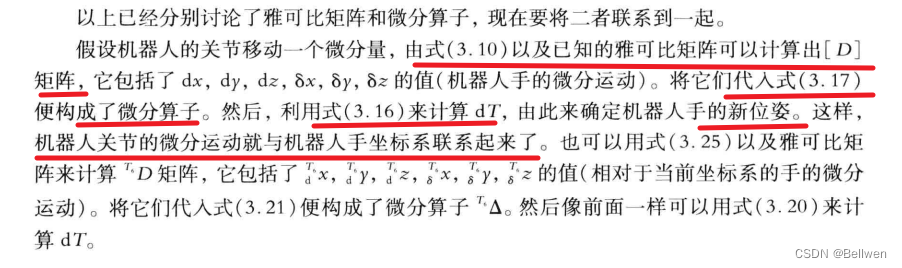
这段话的意思可以理解为:
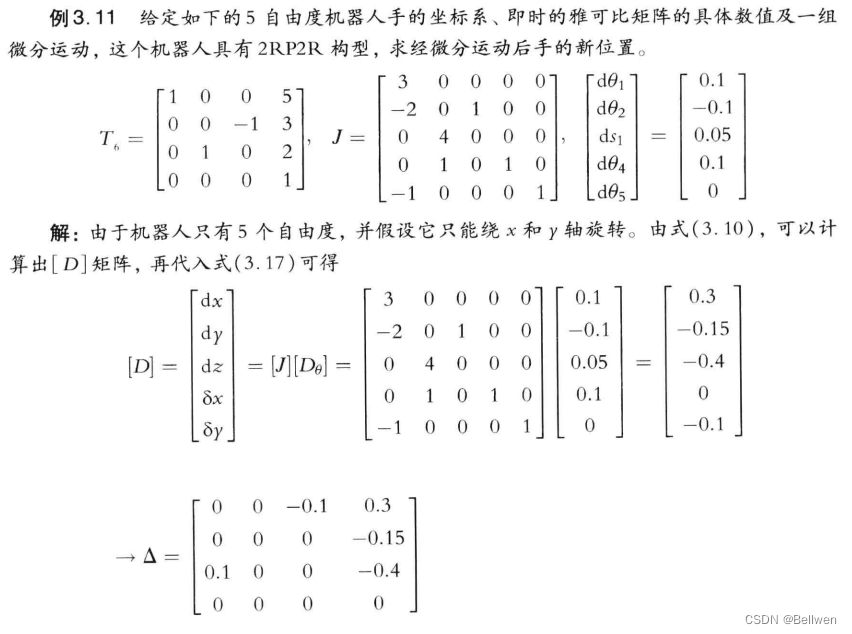
已知机器人关节移动的微分量和雅可比矩阵
用这个公式可以求得矩阵D,即机器人手的微分运动dx,dy,dz, δ \delta δx, δ \delta δy, δ \delta δz
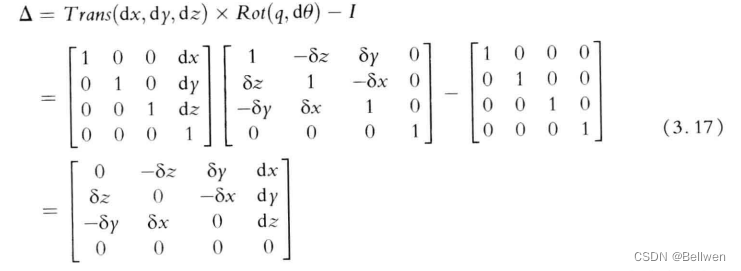
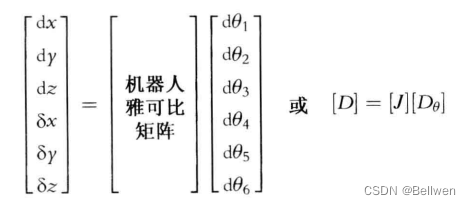
已经求得矩阵D,再代入上述公式可得微分算子 Δ \Delta Δ

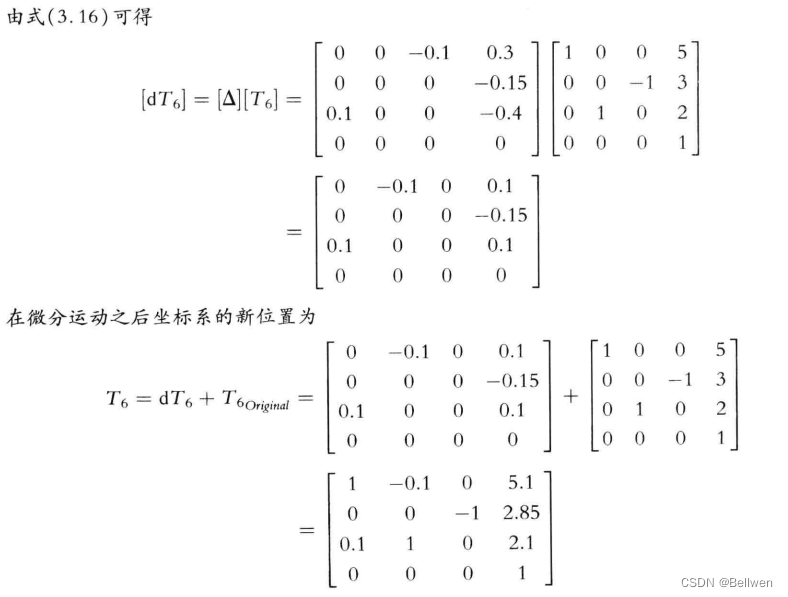
再将微分算子 Δ \Delta Δ代入上述公式,即可得 [ dT ]
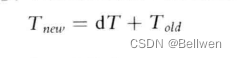
再利用上述公式可得,机器人手新的位姿
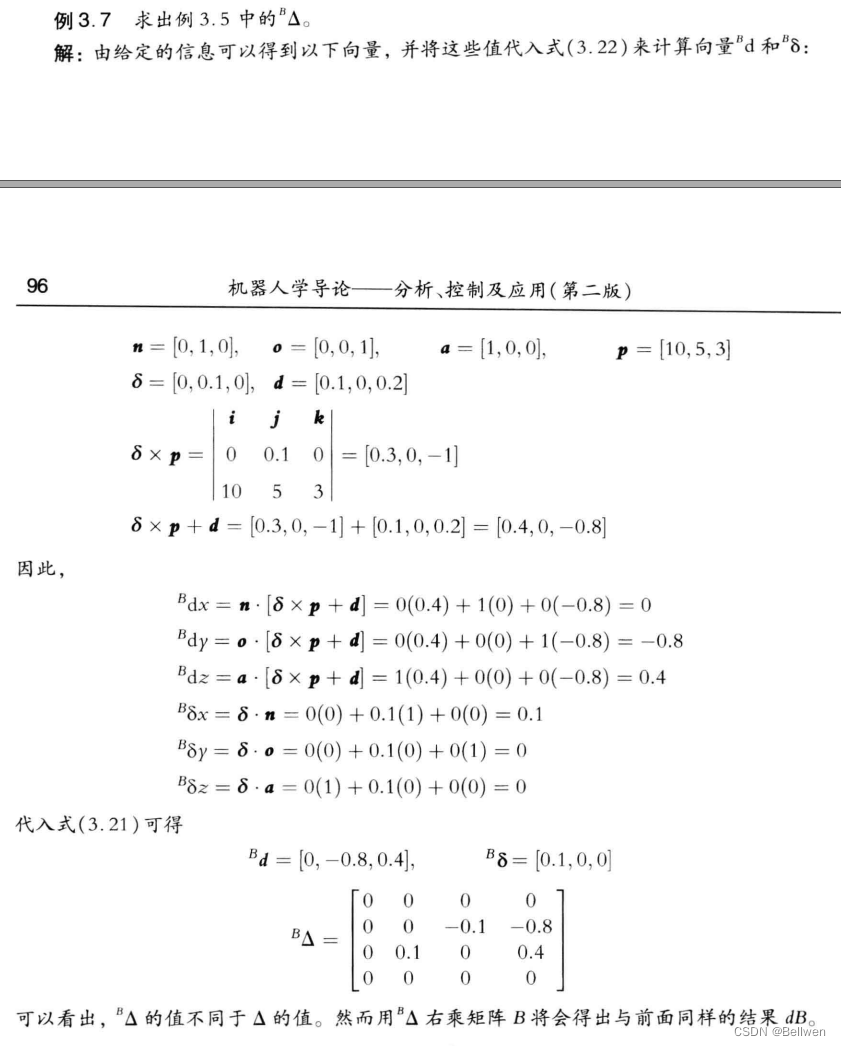
例题
五、雅可比矩阵求逆
已知机器人手的速度需求即矩阵D,为了使得机器人手达到该速度需求,需要计算机器人各关节的速度即矩阵 D θ D_θ Dθ,因此也需要计算雅可比矩阵的逆。

本文采用逆运动方程来计算关节的速度,详解如下所示

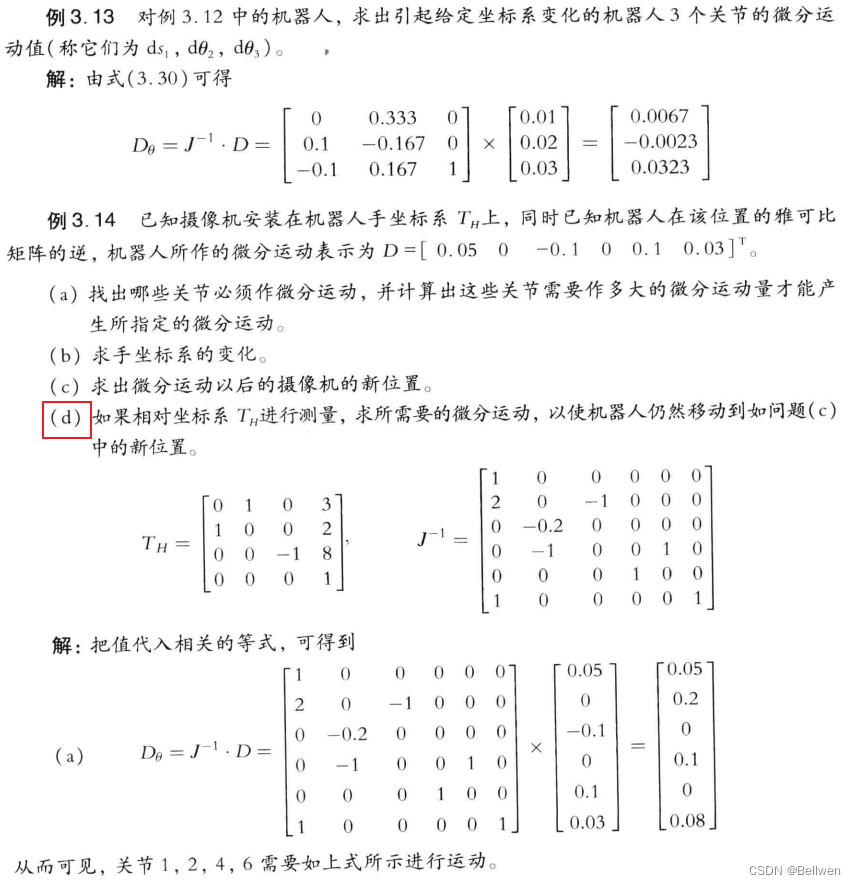
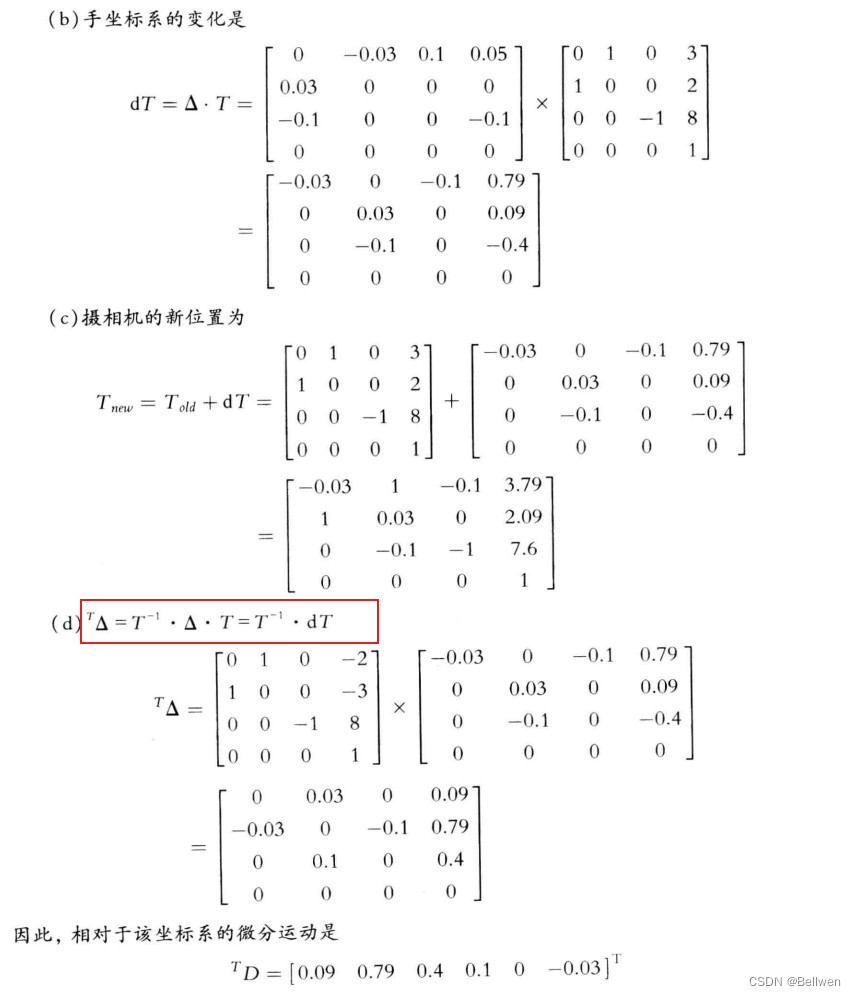
例题1:利用已知雅可比逆求关节速度
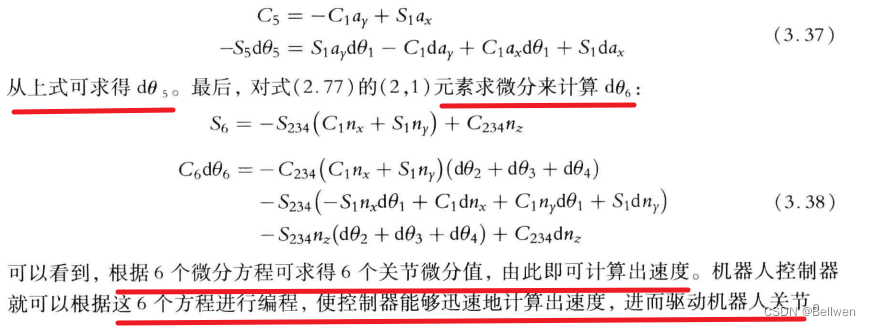
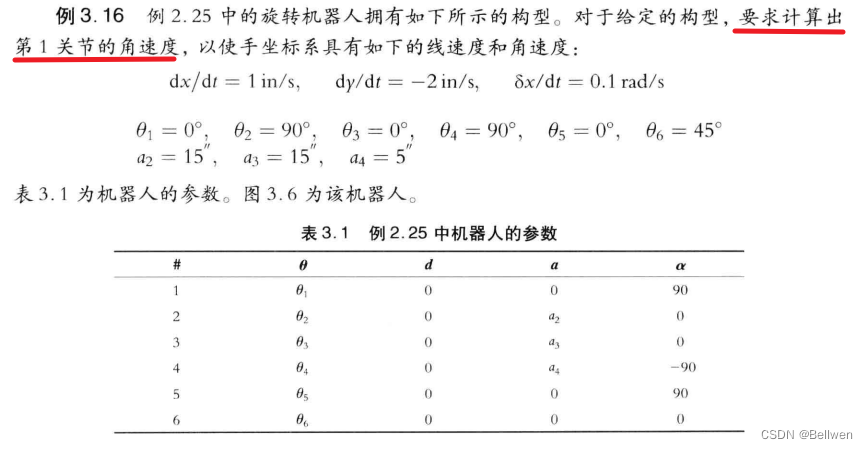
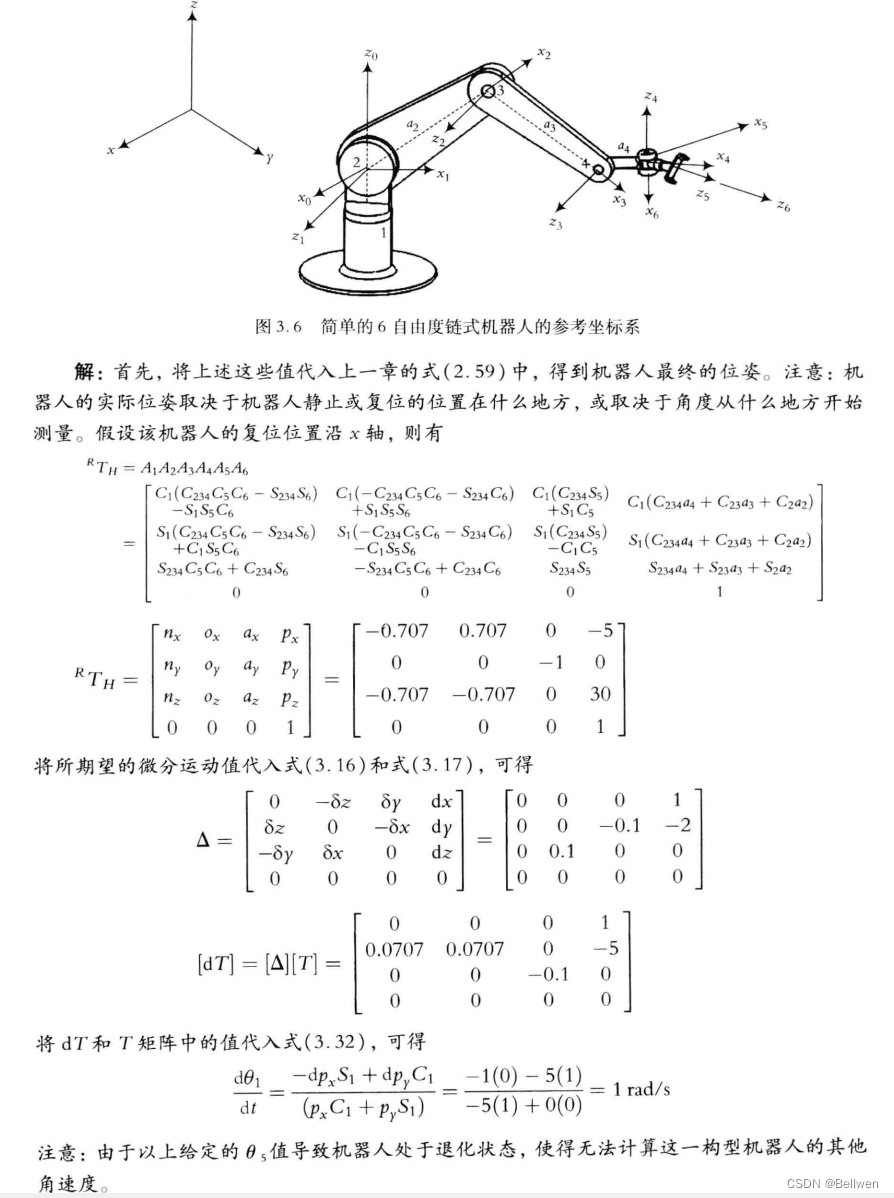
例题2:利用逆运动方程直接求关节速度
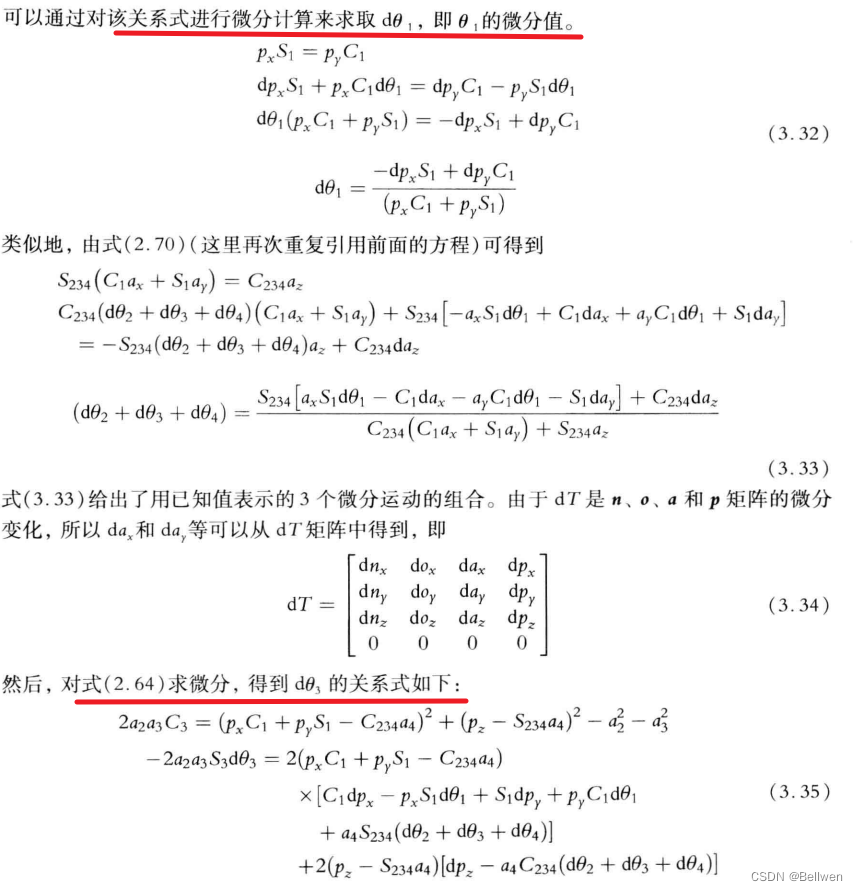
此题是利用逆运动方程直接求关节速度,因为雅可比矩阵未知,
求出雅可比矩阵计算量十分大,再利用求得的雅可比矩阵去利用公式求关节速度显得十分麻烦。
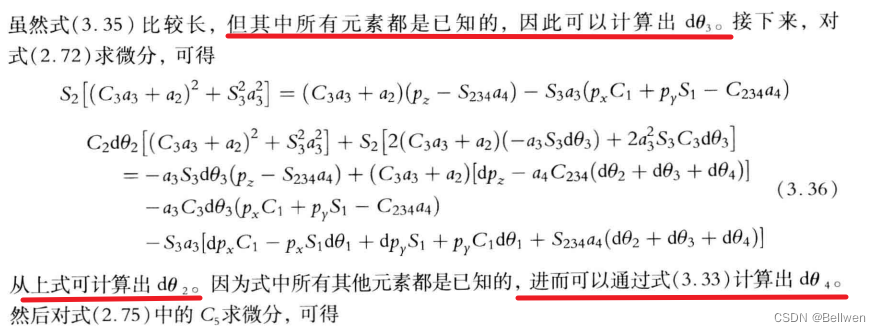
所以比较好的方法是利用逆运动方程直接求关节速度
利用雅可比矩阵可以找出机器人工作空间中是否存在退化点
全局退化:机器人在某些特殊姿态下会使它丧失一个乃至多个自由度的情况
局部退化:机器人在某种情况下出现某个关节的无解,通过调整运动方程可以得到解决
可以采用对雅可比矩阵求行列式等方法
参考:
https://max.book118.com/html/2017/0525/109105829.shtm
总结
通过学习本章内容,利用公式,
已知机器人关节速度,利用雅可比矩阵可以得到机器人手的运动速度;
已知机器人手的运动速度,求雅可比矩阵的逆可以得到机器人各关节的速度。
同时也学习了不使用雅可比矩阵求关节速度的方法,利用机器人的逆微分运动方程,就可以确定每个关节速度为多少才能产生所期望的机器人手速度。
知道了机器人逆运动方程和逆运动微分方程,即知道机器人在空间中的位置和速度。
第一章运动学的正运动方程和逆运动方程是为了求得机器人的位置;本章节的微分运动是在已知位置的基础上求得机器人的运动速度和各个关节速度;下一章节动力学分析是为了在已知机器人运动速度和关节速度的基础上,如何让机器人各个关节去转动和驱动器驱动多大的力来满足机器人期望的运动速度。
本文主要参考:机器人学导论 分析、控制及应用 第2版 (Saeed B. Niku)